Noise Tolerant
Overview
Noise tolerance is an important aspect of computer vision, as it enables the algorithm to correctly detect and classify objects even when the input data is corrupted or noisy.
In computer vision, noise can refer to any unwanted variation or distortion in the input image or video, including variations in lighting, image blur, motion blur, sensor noise, and other forms of noise. Noise tolerance is an important consideration in computer vision, as it can significantly impact the accuracy and reliability of the algorithm. By employing techniques such as image preprocessing, feature selection, robust estimation, and deep learning, computer vision algorithms can become more robust to noise and perform more effectively in real-world settings.
Introduction
In computer vision, images are often corrupted by noise, which can significantly affect the performance of algorithms used for tasks like image segmentation and object recognition. OpenCV is an open-source computer vision library that provides a wide range of tools and techniques for processing and analyzing images. One of the challenges in image processing is dealing with noise, and OpenCV provides several techniques to handle it. In this article, we will discuss noise tolerance in OpenCV and how it can be implemented with code examples.
What is Noise?
Noise in an image is the presence of artifacts that do not originate from the original scene content. Generally speaking, noise is a statistical variation of a measurement created by a random process. In imaging, noise emerges as an artifact in the image that appears as a grainy structure covering the image.
What is Noise Tolerance in OpenCV?
- Noise tolerance is the ability of an algorithm to resist the effects of noise present in an image.
- OpenCV provides a range of algorithms for image processing, including denoising techniques that aim to remove the noise from an image while preserving its essential features.
- The goal is to obtain a clean image that can be further processed by other algorithms without being affected by the noise.
Types of Noise
There are different types of noise in image processing. The common types of noises in OpenCV are:
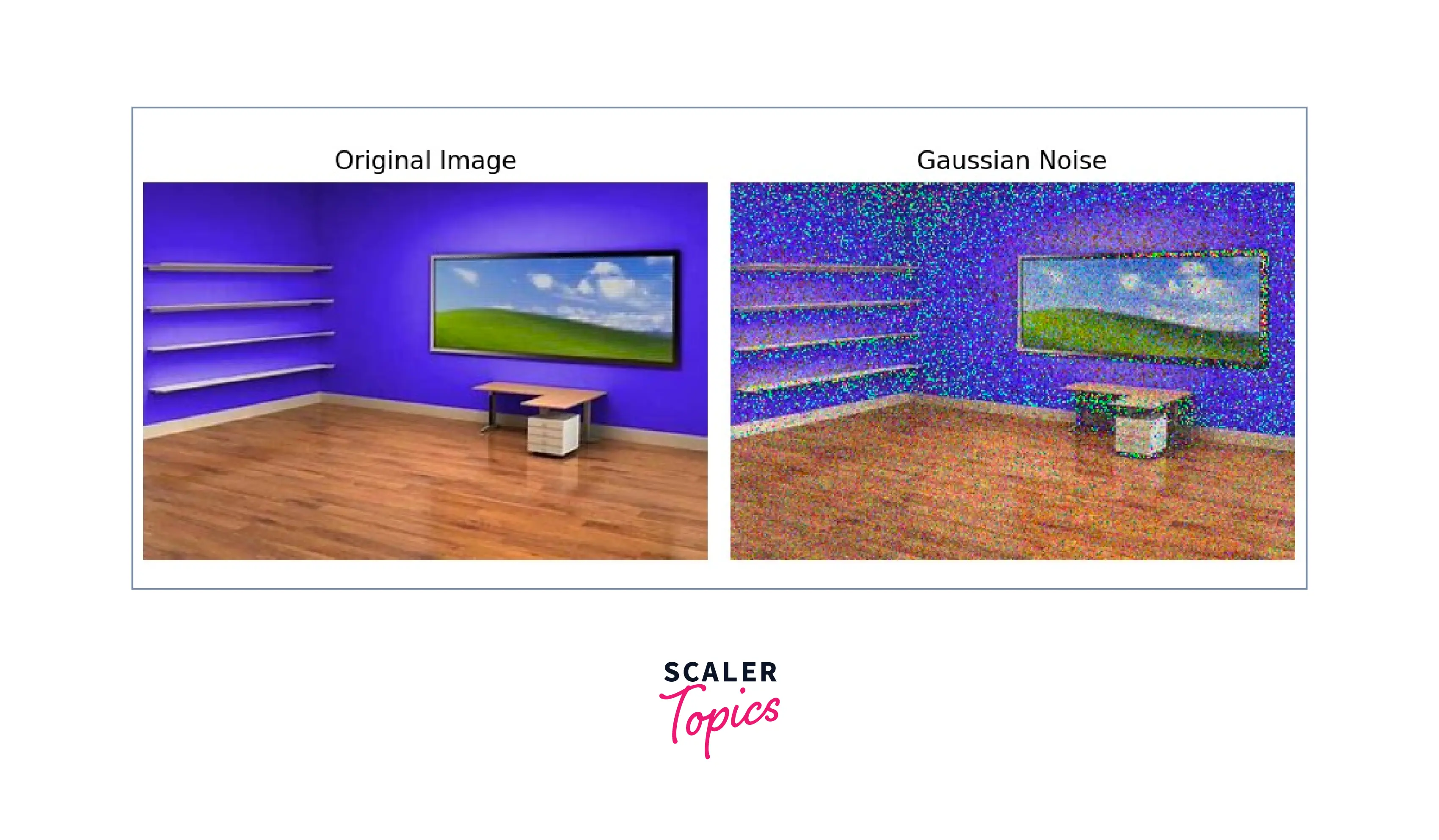
1. Gaussian Noise:
Gaussian noise is one of the types of noise which follows the Gaussian distribution. It is defined by its mean and standard deviation values. Gaussian noise is usually caused by sensor noise or electronic interference.
Example:
Output:
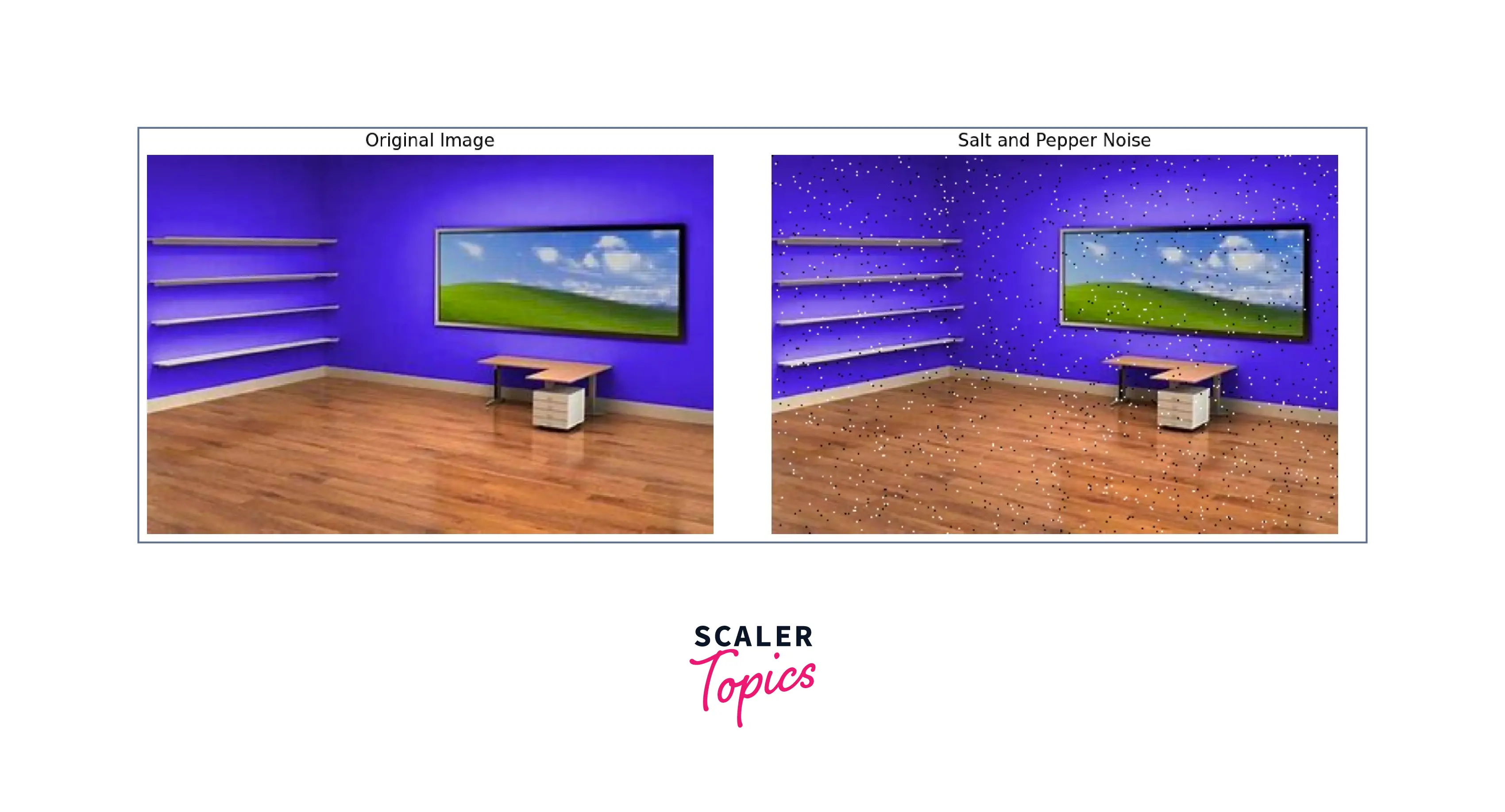
2. Salt and Pepper Noise:
Salt and pepper noise is a type of noise that occurs as white and black pixels in the image. It is caused by errors in image acquisition or transmission.
Example:
Output:
3. Speckle Noise:
Speckle noise is a type of noise that occurs in images acquired by ultrasound or laser imaging systems. It is caused by the interference of the sound or light waves.
Example:
Output:
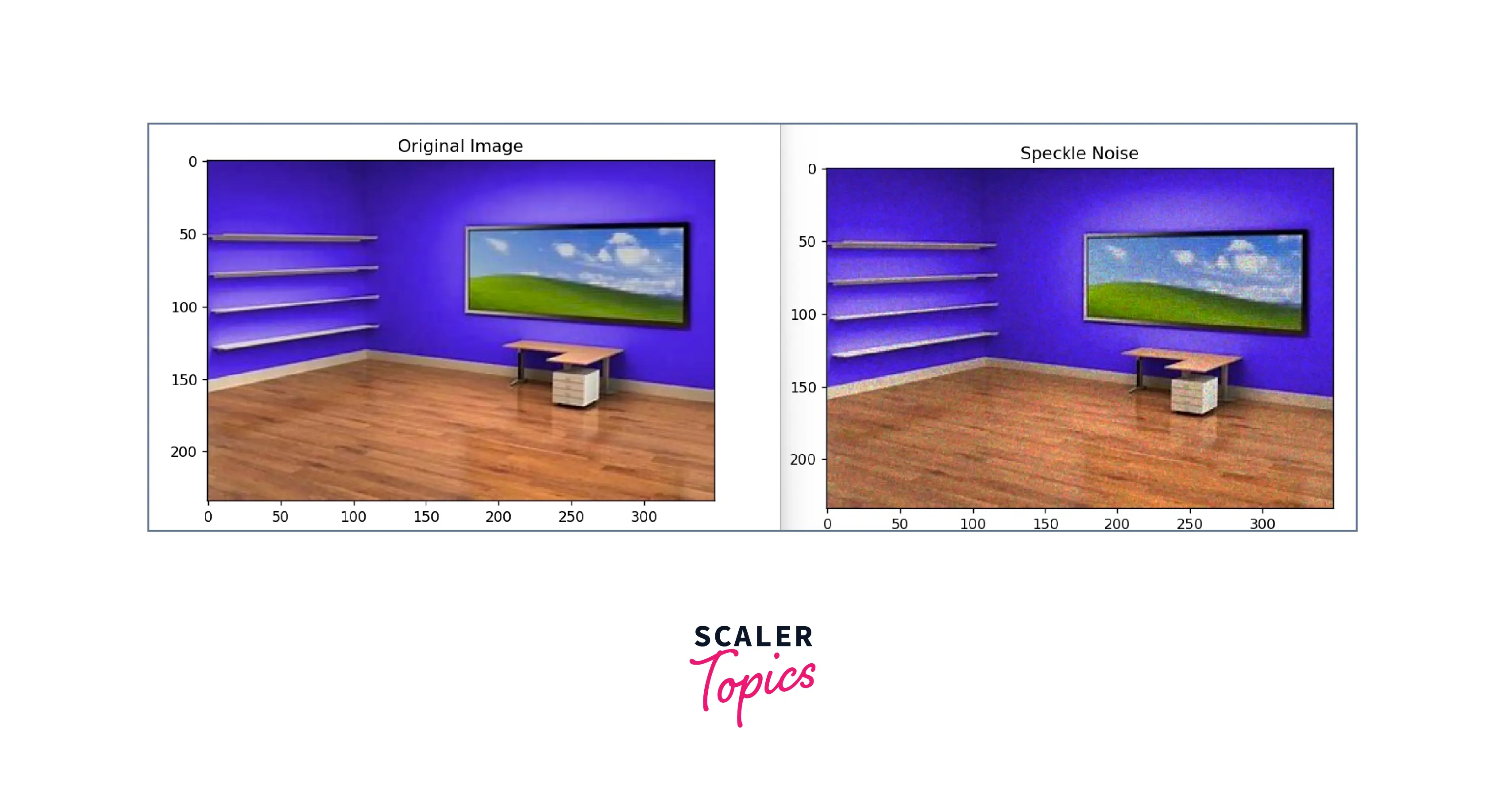
Image Denoising Techniques
Now we are going to see how to remove noise from images using opencv python. To remove noise from images, various denoising techniques can be employed. OpenCV provides several image filtering methods that are widely used in computer vision applications. Let's explore some of the commonly used denoising techniques:
1. Median Filtering:
Median filtering replaces each pixel value with the median value of its neighboring pixels. It is effective in removing salt-and-pepper noise while preserving image edges and details.
2. Bilateral Filtering:
Bilateral filtering takes into account both spatial proximity and intensity similarity of pixels to reduce noise. It preserves edges while smoothing out noise, making it suitable for images with fine details.
3. Gaussian Filtering:
Gaussian filtering convolves the image with a Gaussian kernel to attenuate high-frequency noise. It offers a trade-off between noise reduction and preservation of image details.
In the following section, we will demonstrate how to apply these filtering techniques to noisy images using OpenCV and Python.
How to Apply Different Denoising Techniques to Noisy Images with OpenCV?
To apply different denoising techniques to noisy images using OpenCV, in Python you have some functions like,
- Median Filtering:
cv2.medianBlur(): Replaces each pixel value with the median value of its neighboring pixels, effectively reducing noise while preserving edges and details. - Gaussian Filtering:
cv2.GaussianBlur(): Applies a Gaussian blur to the image, smoothing it by averaging pixel values within a defined neighborhood and reducing high-frequency noise. - Bilateral Filtering:
cv2.bilateralFilter(): Performs edge-preserving noise reduction by considering both spatial closeness and pixel value similarity, resulting in noise reduction while preserving important image edges. - Non-local Means Denoising:
cv2.fastNlMeansDenoisingColored(): Reduces noise by averaging similar patches in the image, effectively removing noise while preserving image details and textures.
Implementing Denoising Techniques in OpenCV with Code Examples
In this section, we will discuss how to implement the denoising techniques discussed above in OpenCV using code examples.
To implement non-local means denoising in OpenCV, we can use the cv2.fastNlMeansDenoising function. Here is an example:
Output:
Explanation:
- In this example, we first read the noisy image using the "cv2.imread" function. We then apply non-local means denoising using the "cv2.fastNlMeansDenoising" function.
- The second argument is set to "None," which means that the function will automatically determine the size of the patch and the search window based on the input image.
- The third argument is the strength of the filter.
- while the fourth argument determines the strength of the filter applied to the luminance of the pixels.
- Finally, the fifth argument determines the size of the window used to search for similar patches in the image.
cv2.GaussianBlur
To implement Gaussian denoising in OpenCV, we can use the cv2.GaussianBlur function. Here is an example:
Output:
Explanation:
- In this example, we read the noisy image and apply Gaussian denoising using the cv2.GaussianBlur function.
- The second argument specifies the size of the kernel used for the Gaussian filter,
- The third argument determines the standard deviation of the Gaussian distribution.
cv2.medianBlur
To implement median denoising in OpenCV, we can use the cv2.medianBlur function. Here is an example:
Output:

Explanation:
- In this example, we read the noisy image and apply median denoising using the cv2.medianBlur function.
- The second argument specifies the size of the kernel used for the median filter.
Image Restoration Techniques
Wiener Filtering:
- Wiener filtering is a linear restoration technique that aims to recover the original image by minimizing the mean square error between the restored image and the original image.
- It assumes that the degradation process can be modeled as a linear, shift-invariant system affected by additive noise.
- Wiener filtering involves estimating the power spectral density (PSD) of the original image and the degradation function to compute a restoration filter.
Advantages:
- Effective in restoring images corrupted by additive noise.
- Preserves image details and edges.
Disadvantages:
- Assumes a linear model for degradation, which may not be suitable for all types of image degradation.
- Performance can degrade when the noise level is high or the degradation process is complex.
Deconvolution:
- Deconvolution aims to reverse the degradation process and recover the original image using a point spread function (PSF) that characterizes the blurring or distortion.
- The PSF describes how each point in the original image spreads and contributes to neighboring pixels in the degraded image.
- Common deconvolution algorithms include Richardson-Lucy deconvolution and Lucy-Richardson deconvolution.
Advantages:
- Can potentially recover fine details and sharpness in the image.
- Useful for restoring images affected by motion blur or out-of-focus blur.
Disadvantages:
- Sensitive to noise and can amplify noise artifacts in the restoration process.
- Requires knowledge or estimation of the PSF, which can be challenging in practice.
Non-local Means Denoising:
- Non-local means denoising is a non-linear technique that reduces noise by exploiting the redundancy in the image.
- It works by computing a weighted average of similar patches within the image, where the weights depend on the patch similarities.
- The non-local means algorithm compares and matches patches to estimate the clean image intensity at each pixel location.
Advantages:
- Effective in reducing random noise while preserving image details.
- Suitable for a wide range of noise types and levels.
Disadvantages:
- Can be computationally expensive for large images or real-time applications.
- May introduce some smoothing effects and blur fine details.
These image restoration techniques provided by OpenCV offer different approaches to address various types of image degradation. Choosing the most suitable technique depends on the specific degradation characteristics, noise type, and desired restoration goals. It is recommended to experiment and fine-tune the parameters to achieve the best restoration results for a given scenario.
How to Restore Noisy Images Using Different Techniques with OpenCV?
To restore noisy images using OpenCV, you can follow these general steps:
- Load the noisy image using OpenCV.
- Choose a denoising technique based on your requirements (e.g., Gaussian blur, median filtering, Bilateral Filtering, or non-local means denoising).
- Apply the selected denoising technique to the noisy image using the corresponding OpenCV function.
- Adjust the parameters of the denoising method to achieve the desired level of noise reduction while preserving image details.
- Evaluate the denoised output by visually inspecting the image and comparing it with the original noisy image.
- Repeat these steps or try different denoising techniques to compare their performance and choose the one that provides the best restoration for your specific image and noise characteristics.
Implementing Restoration Techniques in OpenCV with Code Examples
Output:

Image Segmentation Techniques
Image segmentation plays a crucial role in computer vision tasks such as object detection, recognition, and tracking. However, noise in images can significantly affect the accuracy and reliability of segmentation algorithms. Various image segmentation techniques are available in OpenCV to handle noisy images. Let's explore some commonly used segmentation techniques:
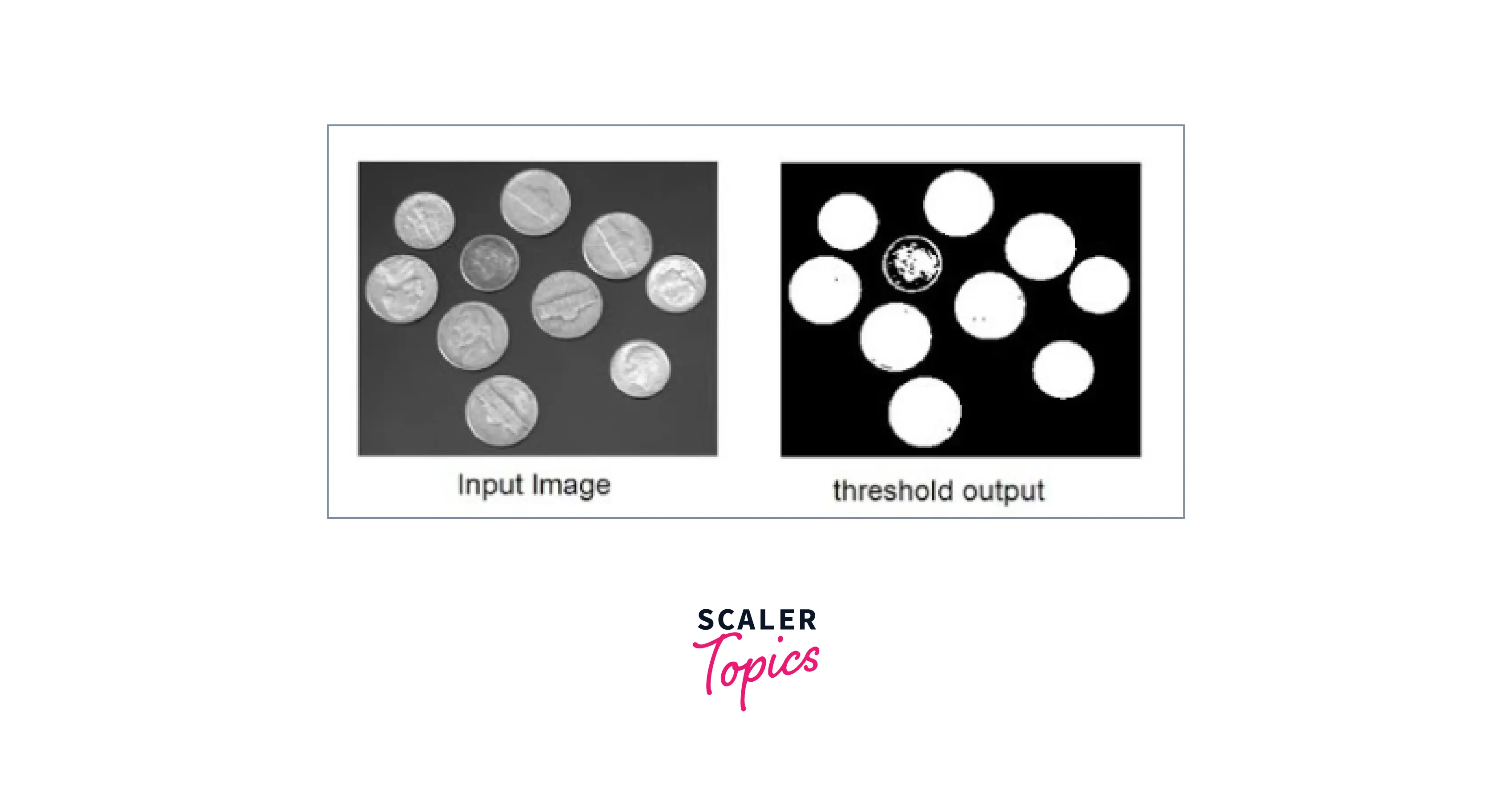
1. Thresholding:
Thresholding is a simple and effective segmentation technique that separates objects from the background based on pixel intensity values. It sets a threshold value and assigns pixels above or below the threshold to different segments.
2. Edge Detection:
Edge detection techniques aim to identify boundaries between different regions in an image. They detect abrupt changes in pixel intensity and represent them as edges, which can be used to segment the image into distinct regions.
3. Watershed Segmentation:
Watershed segmentation treats the image as a topographic landscape and simulates flooding to separate regions. It identifies local minima as markers and fills basins to segment the image.
By understanding the principles and characteristics of these segmentation techniques, developers can choose the most suitable approach for segmenting noisy images in their specific applications.
How to Segment Noisy Images Using Different Techniques with OpenCV?
To segment noisy images using different segmentation techniques with OpenCV, you can follow these general steps:
- Load the noisy image using OpenCV.
- Convert the image to the appropriate color space if necessary.
- Apply the chosen segmentation technique (e.g., thresholding, edge detection, or watershed segmentation) using the corresponding OpenCV function.
- Adjust the parameters of the segmentation method to achieve accurate and meaningful segmentation results.
- Evaluate the segmentation output by visually inspecting the segmentation masks and comparing them with the ground truth or desired segmentation.
- Repeat these steps for each segmentation technique to compare their performance in segmenting noisy images.
Implementing Segmentation Techniques in OpenCV with Code Examples
Here are some code examples for implementing segmentation techniques in OpenCV:
1. Thresholding:
Thresholding is a simple segmentation technique that separates objects from the background based on intensity thresholds.
Output:
2. Edge Detection:
Edge detection algorithms detect sharp-intensity transitions to outline object boundaries.
Output:

3. Watershed Segmentation:
Watershed segmentation groups pixels into regions based on intensity gradients and local minima.
Output:

In the code examples above, make sure to replace 'image.png' with the path to your actual image file. Adjust the parameters (threshold_value, max_value, threshold1, threshold2) based on the specific segmentation technique and the characteristics of your image.
Feel free to experiment with different parameters and explore other segmentation techniques provided by OpenCV to achieve the desired segmentation results.
Performance Evaluation
To assess the effectiveness of different noise reduction techniques, it is crucial to evaluate their performance quantitatively. Two commonly used metrics for evaluating the quality of denoised images are Peak Signal-to-Noise Ratio (PSNR) and Structural Similarity Index Measure (SSIM).
-
PSNR:
PSNR measures the ratio between the maximum possible power of an image and the power of the noise present in it. Higher PSNR values indicate better image quality and lower noise levels. -
SSIM:
SSIM assesses the similarity between two images by considering the perceived structural information, luminance, and contrast. Higher SSIM values indicate better image quality and greater similarity to the original image. -
By calculating PSNR and SSIM values for different denoising techniques on a set of noisy images, developers can objectively compare the performance and choose the most effective technique for their specific application.
To evaluate the performance of different noise reduction techniques using OpenCV, you can follow these steps:
- Select a set of noisy images that represent the noise characteristics encountered in your application.
- Apply each denoising technique (e.g., median filtering, bilateral filtering, or Gaussian filtering) to the noisy images using the corresponding OpenCV functions.
- Calculate the PSNR and SSIM values between the denoised images and the corresponding original noise-free images.
- Analyze the obtained results and compare the performance of different techniques based on their PSNR and SSIM values.
- Consider other factors such as computational efficiency, visual quality, and the specific requirements of your application to make an informed decision.
FAQs
Q. What is the best denoising technique in OpenCV?
A The best denoising technique in OpenCV depends on the type of noise present in the image. Non-local means denoising is a good all-purpose technique, while median denoising is particularly effective in removing impulse noise.
Q. Can denoising techniques in OpenCV remove all types of noise?
A. No, denoising techniques in OpenCV are not perfect and may not be able to remove all types of noise present in an image.
Q. How can I choose the optimal denoising parameters for my image?
A. The optimal denoising parameters depend on the type and amount of noise present in the image. It is usually necessary to experiment with different parameter values to determine the best settings.
Q. Can I use denoising techniques in real-time applications?
A. Yes, denoising techniques in OpenCV can be used in real-time applications as long as the computational resources are available to process
Conclusion
- In this article, we studied the Noise tolerance in OpenCV python, which contains several noises in the images also with some filters
- We saw it with examples along with its explanation in the Python language. Refer to the references given below to know more about Noise tolerance in OpenCV Python.