Robotics in Artificial Intelligence
Overview
Robotic systems integrated with artificial intelligence (AI) are rapidly changing the landscape of many industries, making them more efficient and precise than ever before. These intelligent machines can perform complex tasks with ease, and the possibilities for their use are almost limitless. The integration of Robotics in AI has created a new field of research and development, with engineers and scientists working on designing and building robots that can sense, learn, and adapt to their environment. The integration of robotics in AI has enabled us to create machines that can operate autonomously, making decisions based on data and performing tasks that require a high level of intelligence.
Introduction
Robotics in AI has been making headlines in recent years as they continue to revolutionize various industries. These intelligent machines are capable of performing tasks that were previously reserved for humans, such as driving, operating machinery, and even performing surgeries. The use of Robotics in AI has created a new era of intelligent machines that can sense, learn, and adapt to their environment, making them more efficient, reliable, and precise than ever before. The integration of AI technologies into robotics has also sparked debate about the impact of these machines on society, leading to discussions around ethics, safety, and human-robot collaboration. In this article, we will explore the exciting field of Robotics in AI and examine how it is transforming various industries, as well as the challenges and opportunities that lie ahead.
What are Robots?
Robots are machines designed to perform specific tasks autonomously or with minimal human intervention. These machines can range from simple machines that perform repetitive tasks to highly advanced machines that can make decisions and interact with their environment. The use of Robotics in AI has enabled the development of intelligent machines that can perceive, reason, and act in complex environments.
Robots come in various shapes and sizes and can be classified based on their design, functionality, and application. Some robots are designed for specific tasks such as welding, painting, or assembly line work, while others are used for more complex tasks such as exploration, healthcare, or transportation.
The design of a robot is typically based on its intended application. Some robots are designed to operate on wheels or tracks, while others have legs or arms that allow them to navigate through uneven terrain or manipulate objects. The size of a robot can also vary greatly, from small robots that fit in the palm of your hand to large industrial robots that can be several meters tall.
What is Robotics?
Robotics is a multidisciplinary field that encompasses the design, construction, operation, and use of robots. It involves a combination of mechanical, electrical, and software engineering, as well as computer science, artificial intelligence, and other related fields. Robotics is an essential field that has a wide range of applications, including manufacturing, healthcare, transportation, entertainment, and many others.
Aspects of Robotics
Several key aspects of robotics are essential to understanding the field. These include:
- Mechanical Design: This aspect of robotics involves the design and construction of robots, including their physical structure, sensors, actuators, and other components. Mechanical design is crucial to the performance and functionality of a robot, and it involves considerations such as weight, size, and durability.
- Electrical and Electronics: This aspect of robotics focuses on the electrical and electronic systems that power and control robots. It includes the design and development of circuit boards, power systems, and other electrical components that enable a robot to operate.
- Software and Control: This aspect of robotics involves the development of software and control systems that enable a robot to perform its intended functions. This includes the use of programming languages such as Python, C++, and Java, as well as the development of control algorithms that enable a robot to navigate and interact with its environment.
Difference in Robot Systems and Other AI Programs
The table below summarizes some of the key differences between robot systems and other AI programs:
| Aspect | Robot Systems | Other AI Programs |
|---|---|---|
| Physical embodiment | Have a physical structure and can interact with the physical environment | Do not have a physical structure and operate in a virtual environment |
| Sensory input | Can receive input from sensors that detect physical properties such as temperature, pressure, and movement | Receive input from virtual sensors that simulate physical properties |
| Actuators | Have physical actuators such as motors and grippers that allow them to manipulate objects in the physical environment | Do not have physical actuators and can only affect the virtual environment |
| Autonomy | Can operate autonomously, making decisions and carrying out tasks based on input from sensors and other sources | Typically require human input and supervision to carry out tasks |
| Purpose | Designed to perform physical tasks such as manufacturing, transportation, and exploration | Designed to perform tasks in virtual environments such as gaming, language translation, and image recognition |
Robot Locomotion
Robot locomotion refers to the method by which a robot moves from one place to another. There are several types of locomotion that robots can use, each with its advantages and disadvantages depending on the specific application. The four primary types of robot locomotion are legged, wheeled, a combination of legged and wheeled locomotion, and tracked slip/skid.
- Legged Locomotion: Legged locomotion involves the use of legs to move a robot. Legged robots can move in a variety of ways, such as walking, running, and climbing, and are often used in environments where wheeled robots cannot operate effectively. Legged robots have the advantage of being able to traverse rough terrain, climb over obstacles, and navigate uneven surfaces, making them ideal for search and rescue missions, exploration, and military applications.
- Wheeled Locomotion: Wheeled locomotion involves the use of wheels to move a robot. Wheeled robots are the most common type of mobile robot and are used in a wide range of applications, from manufacturing and logistics to home cleaning and entertainment. Wheeled robots have the advantage of being able to move quickly and smoothly over flat and level surfaces, but they can have difficulty navigating uneven terrain or climbing over obstacles.
- Combination of Legged and Wheeled Locomotion: Some robots combine legged and wheeled locomotion, allowing them to take advantage of the benefits of both types of locomotion. These robots are often designed to switch between legged and wheeled modes depending on the terrain and environment. Combination locomotion robots can move quickly and smoothly over flat surfaces and also climb over obstacles and navigate uneven terrain.
- Tracked Slip/Skid Locomotion: Tracked slip/skid locomotion involves the use of tracks or skids to move a robot. Tracked robots have the advantage of being able to operate in rugged terrain and climb over obstacles, but they can have difficulty with stability and can sometimes slip or get stuck.
Components of a Robot
A robot is made up of several components that work together to enable it to perform its tasks. These components include power supplies, actuators, sensors, and controllers. Each of these components is critical to the operation of the robot, and they must be carefully selected and integrated to create a functional system.
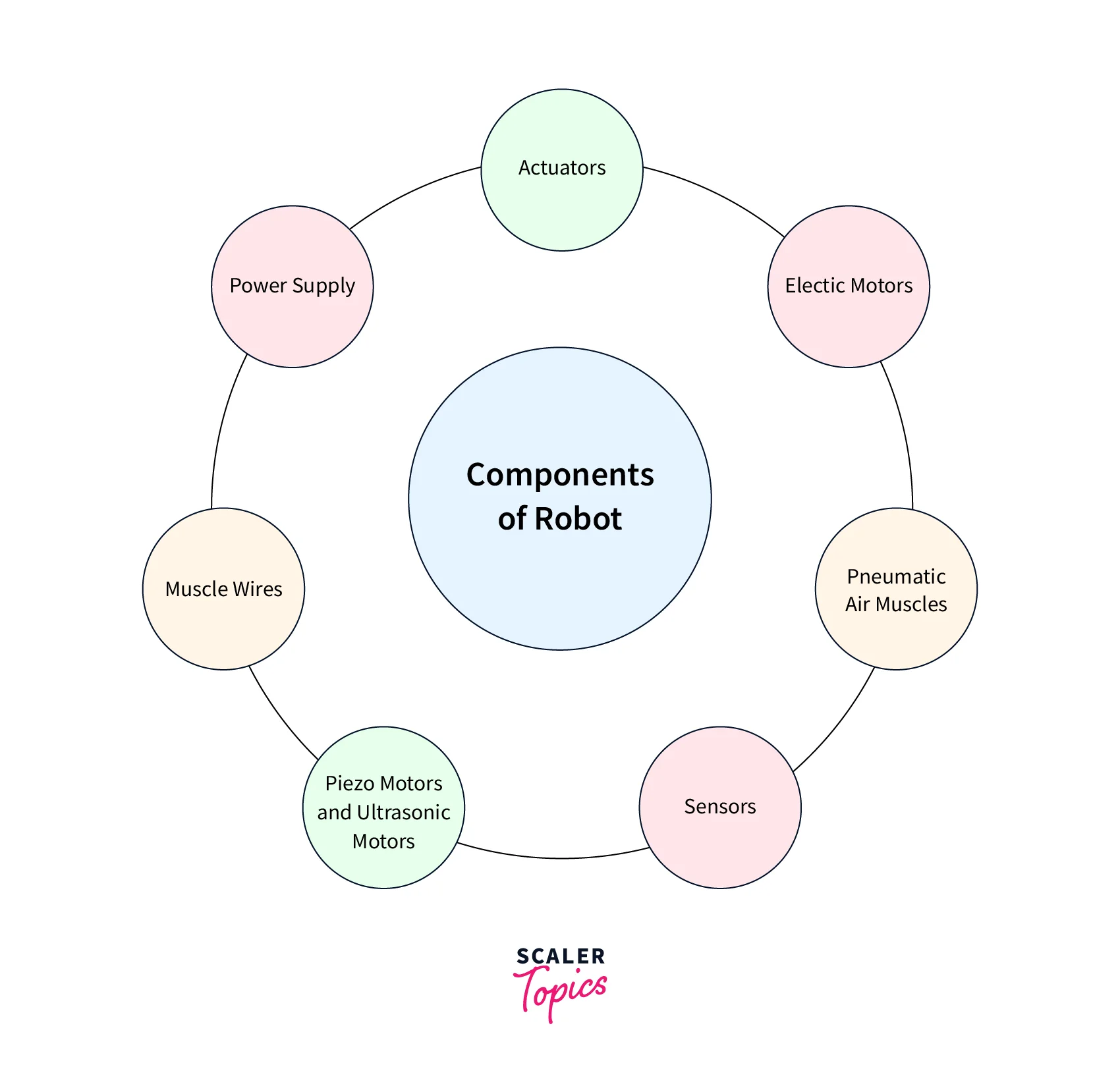
- Power Supply: The power supply is the component that provides the energy required to power the robot's actuators and sensors. The power supply can be a battery, a fuel cell, or a power cable connected to an external power source. The choice of power supply depends on the specific requirements of the robot, such as its size, weight, and power consumption.
- Actuators: Actuators are the components that allow the robot to move and manipulate objects. Several types of actuators can be used in robots, including electric motors, pneumatic air muscles, muscle wires, and piezo and ultrasonic motors. The choice of the actuator depends on the specific task the robot needs to perform.
- Electric Motors (AC/DC): Electric motors are the most common type of actuator used in robots. They can be either AC or DC motors, and they convert electrical energy into mechanical motion. AC motors are often used for high-power applications, while DC motors are preferred for low-power applications.
- Pneumatic Air Muscles: Pneumatic air muscles are actuators that use compressed air to create motion. They consist of a flexible polymer tube that contracts when air is introduced, allowing the robot to move its joints. Pneumatic air muscles are lightweight and can generate a large amount of force, making them ideal for applications that require high power-to-weight ratios.
- Muscle Wires: Muscle wires are actuators that use a shape memory alloy to create motion. When an electrical current is applied to the wire, it contracts and creates movement. Muscle wires are lightweight and can generate high forces, making them ideal for applications that require precise movements.
- Piezo Motors and Ultrasonic Motors: Piezo motors and ultrasonic motors are actuators that use piezoelectric materials to create motion. They are often used in applications that require high precision and low noise levels.
- Sensors: Sensors are the components that allow the robot to perceive its environment. Several types of sensors can be used in robots, including cameras, LIDAR, ultrasound sensors, and touch sensors. The choice of the sensor depends on the specific task the robot needs to perform and the type of environment it will be operating in.
Computer Vision
Computer vision is a field of artificial intelligence that enables computers to interpret and understand the visual world. It involves the use of algorithms and techniques to analyze and interpret images and videos. Computer vision has numerous applications, such as in autonomous vehicles, robotics, and medical imaging.
Hardware of Computer Vision System
A computer vision system consists of hardware and software components. The hardware components include:
- Power supply: A power supply is needed to provide electricity to the computer vision system. The power supply needs to be able to provide enough power to run all the hardware components and prevent power interruptions that could cause data loss.
- Image acquisition device such as camera: Cameras are used to capture images and videos, which are then processed by computer vision algorithms. The choice of camera depends on the specific requirements of the application, such as image resolution, frame rate, and field of view.
- Processor: A processor is responsible for executing the computer vision algorithms. Several types of processors can be used in computer vision systems, such as CPUs, GPUs, and FPGAs. The choice of a processor depends on the specific requirements of the application, such as processing speed and power consumption.
- Software: Computer vision software is used to analyze and interpret images and videos. It uses algorithms and techniques to process visual data and extract information from it. There are several open-source and commercial computer vision software libraries available.
- Display device for monitoring the system: It is used to monitor the system's performance and output. The output can be in the form of images, videos, or text.
- Accessories such as camera stands, cables, and connectors: These are required to connect and position the hardware components. The choice of accessories depends on the specific requirements of the application, such as the size of the camera and the distance between the camera and the object.
Tasks of Computer Vision
Computer vision is used to perform a variety of tasks that involve analyzing and interpreting visual data. Some of the common tasks of computer vision include:
- OCR (Optical Character Recognition): OCR is a computer vision task that involves recognizing printed or handwritten text in an image or video. OCR is commonly used to convert physical documents into digital format and to extract text from images for analysis.
- Face Detection: It is a computer vision task that involves detecting and locating human faces in images or videos. Face detection is commonly used in security systems, video surveillance, and social media applications.
- Object Recognition: Object recognition is a computer vision task that involves recognizing and classifying objects in images or videos. Object recognition is commonly used in autonomous vehicles, robotics, and surveillance systems.
- Estimating Position: It is a computer vision task that involves determining the position and orientation of objects in 3D space based on their 2D projections in an image or video. Estimating position is commonly used in augmented reality, robotics, and medical imaging.
Application Domains of Computer Vision
- Agriculture: Computer vision is used in agriculture to analyze crop health, detect diseases, and monitor crop growth to improve crop yield and reduce waste.
- Autonomous Vehicles: It is a critical component of autonomous vehicles, providing the ability to detect and track objects, navigate roads, and make decisions based on real-time data.
- Biometrics: It is used in biometrics for facial recognition, fingerprint recognition, and iris recognition to enhance security systems.
- Character Recognition: Computer vision is used in character recognition to extract text from images, process handwriting, and automate data entry tasks.
- Forensics, Security, and Surveillance: Computer vision is used in forensics, security, and surveillance to identify suspects, monitor activity, and analyze video footage.
- Industrial Quality Inspection: It is used in industrial quality inspection to detect defects, measure dimensions, and ensure the quality of manufactured products.
- Gesture Analysis: Computer vision is used in gesture analysis to interpret human body language and recognize hand gestures for human-computer interaction.
- Geoscience: It is used in geoscience to analyze satellite imagery, map terrain, and study environmental changes.
- Medical Imagery: Computer vision is used in medical imagery for diagnosis, image analysis, and surgery planning.
- Pollution Monitoring: It is used in pollution monitoring to detect environmental changes, monitor air and water quality, and predict weather patterns.
- Process Control: It is used in process control to monitor industrial processes, detect anomalies, and optimize production.
- Remote Sensing: It is used in remote Sensing to collect and analyze data from distant sources, such as satellites or drones.
- Robotics: Computer vision is used in robotics to enable robots to navigate their environment, recognize objects, and interact with humans.
- Transport: It is used in transport for traffic monitoring, driver assistance, and autonomous vehicles to enhance safety and efficiency.
Applications of Robotics
- Manufacturing: Robotics are commonly used in manufacturing for assembly, packaging, and quality control to improve productivity and efficiency.
- Healthcare: Robotics are used in healthcare for surgery, rehabilitation, and patient care to improve outcomes and reduce costs.
- Agriculture: It is used in agriculture for harvesting, planting, and monitoring crops to improve yield and reduce waste.
- Military and Defense: Robotics are used in military and defense for bomb disposal, reconnaissance, and battlefield support to enhance safety and efficiency.
- Space Exploration: It is used in space exploration for exploration, maintenance, and research to improve our understanding of the universe.
- Entertainment: Robotics are used in entertainment for amusement park rides, animatronics, and special effects to enhance the user experience.
- Education and Research: It is used in education and research for teaching, experimentation, and exploration to enhance learning and innovation.
- Transportation: It is used in transportation for automated vehicles, drones, and logistics to improve safety and efficiency.
- Environmental Monitoring: Robotics are used in environmental Monitoring for pollution detection, wildlife tracking, and climate research to improve our understanding of the environment.
Conclusion
- Robots are machines designed to perform specific tasks autonomously or with minimal human intervention.
- A subfield of artificial intelligence called robotics uses computer science, mechanical engineering, and electrical engineering to design, build, and use robots.
- Computer vision is a field of artificial intelligence that enables computers to interpret and understand the visual world.
- Robotics has a wide range of applications in various fields such as manufacturing, healthcare, agriculture, military and defense, space exploration, entertainment, education and research, transportation, and environmental Monitoring.
- The tasks of computer vision include OCR, face detection, object recognition, and estimating position. These tasks have a wide range of applications in various fields, such as security, transportation, healthcare, and entertainment.
- The primary difference between robot systems and other AI programs lies in the physical embodiment of robots, which allows them to interact with the physical environment in ways that other AI programs cannot.